На фото — Робот-пчела RoboBee, которого уже на протяжении шести лет продолжают совершенствовать инженеры из Гарвардского университета
Опубликовано 31.01.2020 ·
Комментарии: 0
·
На чтение: 1 мин
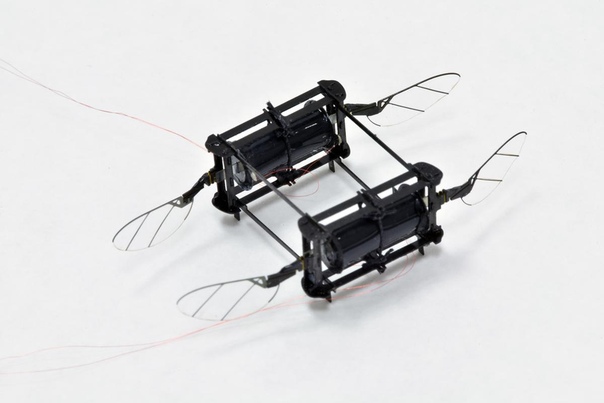
В июне ему удался первый свободный полет. Сейчас же исследователи оснастили его мягкими приводами на основе диэлектрических эластомеров весом в 100 мг. Было создано два варианта, управляемых на частоте 500 Гц, с двумя приводами и с четырьмя, которым удалось выдержать столкновения с внешними препятствиями.
Четырехприводному варианту удалось еще и зависнуть в воздухе первым для подобного типа робота.
Фото: Harvard Microrobotics Lab





